09. Binary Bayes Filter Algorithm
Input
The binary Bayes filter algorithm computes the log odds of the posterior belief denoted by
l
t
.
Initially, the filter takes the previous log odds ratio of the belief
t-1
and the measurements
z
t
as parameters.
Computation
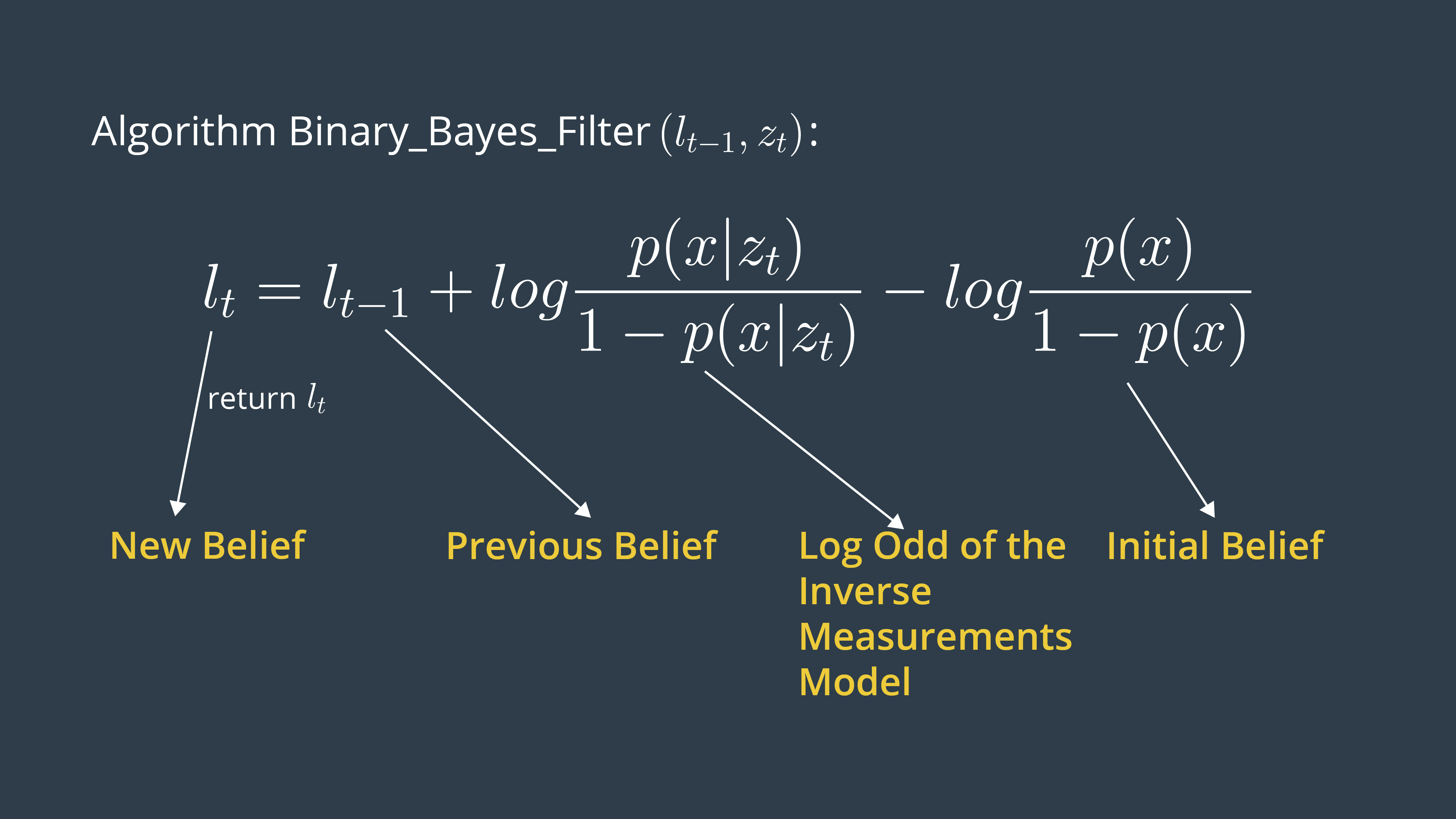
Then, the filter computes the new posterior belief of the system l t by adding the previous belief l t-1 to the log odds ratio of the inverse measurement model log \frac{p(x|z_{t})}{1-p(x|z_{t})} and subtracting the prior probability state also known by initial belief log \frac{p(x)}{1-p(x)} . The initial belief represents the initial state of the system before taking any sensor measurements into consideration.
Output
Finally, the algorithm returns the posterior belief of the system l t , and a new iteration cycle begins.